業(yè)有限公司")
取消
清空記錄
歷史記錄
清空記錄
歷史記錄

 瀏覽器自帶分享功能也很好用哦~
瀏覽器自帶分享功能也很好用哦~RTK-SCAM-60雙目相機(jī)規(guī)格書
一、產(chǎn)品概述
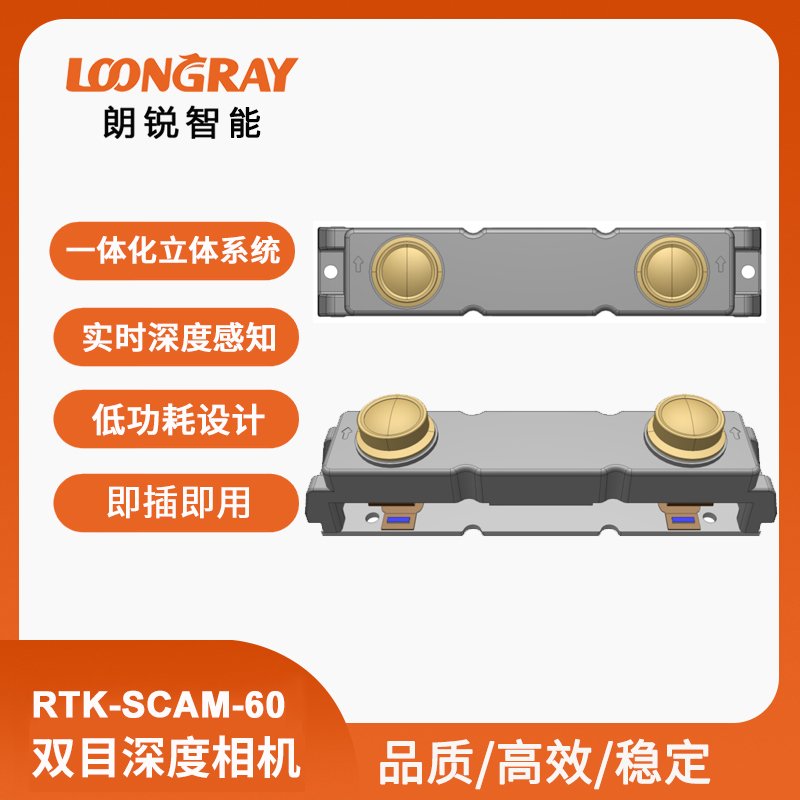
本產(chǎn)品是一款高精度、5V 供電的雙目立體視覺相機(jī)。它由兩個(gè)經(jīng)過精密同步和校準(zhǔn)的單獨(dú)相機(jī)組成,固定基線為 60mm,專為三維空間感知與距離測量而設(shè)計(jì)。通過內(nèi)置的立體匹配算法,可直接輸出高精度的深度圖與點(diǎn)云數(shù)據(jù)。
產(chǎn)品即插即用,無需外部電源,普遍適用于機(jī)器人導(dǎo)航、三維重建、體積測量、避障檢測和互動(dòng)娛樂等領(lǐng)域。既可滿足室內(nèi)環(huán)境,又可滿足室外復(fù)雜光照條件及惡劣天氣,滿足使用溫度范圍。同時(shí)能提供相應(yīng)的感知算法。
模組基于歐冶SD3589高性能SOC,具備高強(qiáng)的ISP圖像處理能力,可針對不同環(huán)境,輸出高質(zhì)量的圖像。內(nèi)置DPU單元,可輸出好的的深度圖像。4T算力的NPU單元,可高效運(yùn)行相應(yīng)的感知算法,便于機(jī)器人上的應(yīng)用和集成。
二、主要特性
1. 一體化立體系統(tǒng): 出廠前已完成雙相機(jī)同步觸發(fā)、硬件對齊和高精度立體校準(zhǔn),用戶無需復(fù)雜的標(biāo)定流程。
2. 主動(dòng)同步: 左右相機(jī)使用 Global Shutter Sensor,圖像采集由硬件信號嚴(yán)格同步,有效消除運(yùn)動(dòng)模糊。
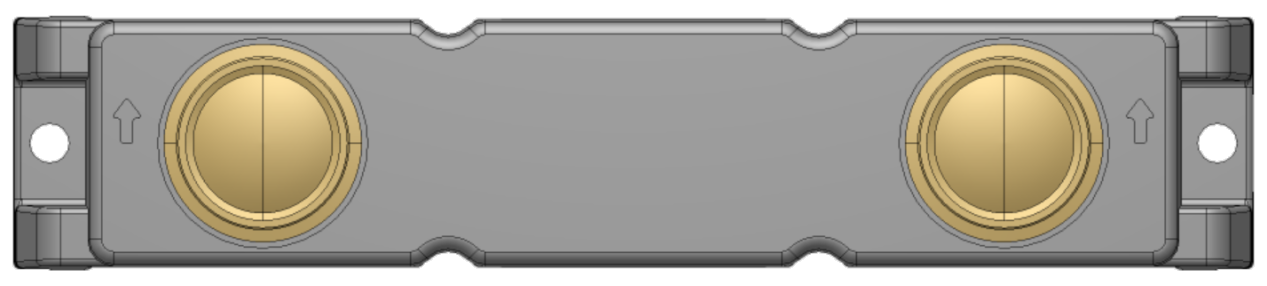
3. 精密機(jī)械結(jié)構(gòu): 堅(jiān)固的金屬/工程外殼確保 60mm 基線在各類工況下保持穩(wěn)定,保證測量精度。
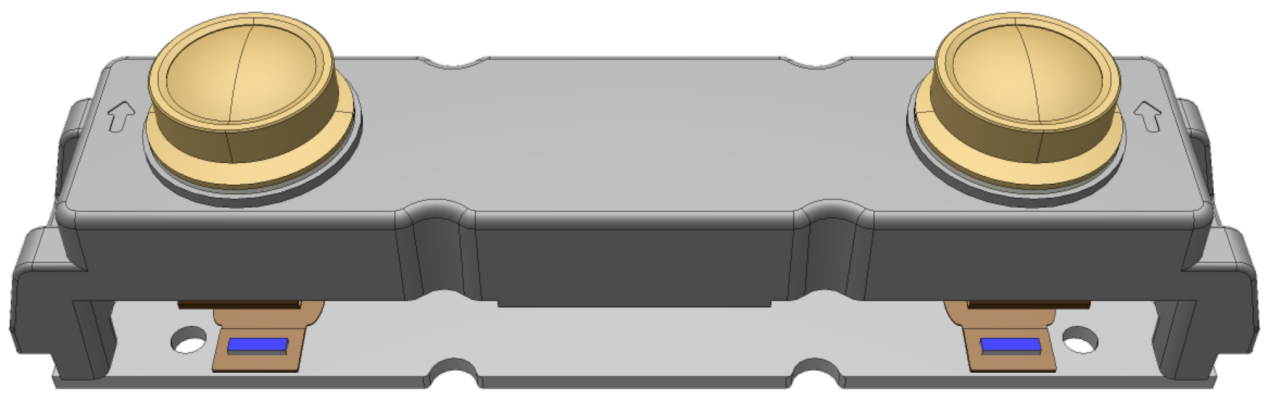
4. 即插即用: 符合 UVC 協(xié)議和 MIPI_CSI 傳輸協(xié)議,通過 USB3.0 接口或 MIPI 接口同時(shí)完成供電和數(shù)據(jù)傳輸,集成簡便。
5. 實(shí)時(shí)深度感知: 提供完整的 SDK,支持實(shí)時(shí)輸出深度圖、校正后 RGB 彩色圖。
6. IMU數(shù)據(jù):同步輸出三軸加速度計(jì)和三軸陀螺儀,時(shí)間戳和視頻幀嚴(yán)格對齊。
7. 低功耗設(shè)計(jì): 整體功耗優(yōu)化,可由標(biāo)準(zhǔn)電腦 USB 端口穩(wěn)定供電。
三、規(guī)格參數(shù)
3.1. 系統(tǒng)規(guī)格
? 雙核 ARM 64 位 Cortex A55 處理器
? 高性能 ISP 圖像處理引擎
? 高效人工智能處理引擎 NPU INT8 算力 2~4T
? MIPI 接口,實(shí)時(shí)響應(yīng)
? USB 3.0 接口,適配性強(qiáng)
? 大視場角,更寬視野范圍
3.2. 產(chǎn)品規(guī)格
項(xiàng)目 | 規(guī)格 |
傳感器配置 | 兩個(gè)全局快門CMOS傳感器 |
基線長度 | 60mm (固定) |
測距范圍 | 0.3m ~ 16m |
同步方式 | 硬件同步 |
數(shù)據(jù)接口 | USB 3.0 Type-C (兼容 USB 2.0,建議使用 USB3.0) |
MIPI_TX_CSI + 1.5Mbps 串口 + I2C | |
供電 | DC 5V ±5% (通過 USB 接口取電) |
整機(jī)功耗 | 小于2.5W (典型值 2.0W),哨兵模式小于2W |
二次開發(fā) | 雙核A55@1.0GHz,NPU@4.0Tops, 支持相機(jī)內(nèi)做 AI 感知、SLAM |
3.3. 圖像參數(shù)
規(guī)格 | 參數(shù) | |
深度輸出格式 | 16 位無符號整數(shù) (單位:1/4 毫米) | |
RGB 圖像 | 分辨率/幀率 | 640×480(1280×1080)/25fps |
數(shù)據(jù)格式 | YUV422 | |
FOV | H80±3°, V60±2° | |
Depth 圖像 | 分辨率 | 640×400(1280×720)/25fps |
數(shù)據(jù)格式 | RGB888 | |
FOV | H78°, V45° | |
啟動(dòng)時(shí)間 | ≤2S | |
3.4. 單目相機(jī)規(guī)格 (單顆)
項(xiàng)目 | 規(guī)格 |
傳感器類型 | 1/3.2”全局快門CMOS |
較高分辨率 | 1280×1080 @30fps(HD) |
像素尺寸 | 3.0um×3.0um |
鏡頭接口 | M12 |
水平視場角(FOV) | 80±3° |
3.5. 深度性能
項(xiàng)目 | 規(guī)格 |
深度圖分辨率 | 較高支持1280×720 @30fps |
測距范圍 | 0.3m - 16m |
精度(距離d) | 0.3m - 2m :±m(xù)ax(2cm,d×1%) |
2m - 5m :±d×2% | |
5m - 16m :精度逐漸下降,可用于物體檢測與粗略測距 |
精度示例:
? 在1m處,精度為 ±m(xù)ax(2cm, 1cm) = ±2cm。
? 在2m處,精度為 ±m(xù)ax(2cm, 2cm) = ±2cm。
? 在3m處,精度為 ± 3m × 2% = ±6cm。
? 在4m處,精度為 ± 4m × 2% = ±8cm。
四、機(jī)械與環(huán)境規(guī)格
項(xiàng)目 | 規(guī)格 |
產(chǎn)品尺寸 | 約:150mm×60mm×40mm不含外殼 |
重量 | 約150g |
外殼材質(zhì) | 鋁合金+工程塑料 |
工作溫度 | 0°C~+45°C |
存儲(chǔ)溫度 | -20°C~+60°C |
濕度 | 20%~80% RH(無冷凝) |
五、軟件與開發(fā)支持
1. 開發(fā)環(huán)境
2 操作系統(tǒng): Windows 10/11, Linux (Ubuntu 18.04+), macOS (部分功能)
2 開發(fā)接口: 提供 C/C++, Python, C# API
2 SDK 功能:
ü 相機(jī)參數(shù)控制(曝光、增益、白平衡)
ü 左右原始圖像采集
ü 深度圖計(jì)算與輸出
ü RGB-D 對齊(彩色圖與深度圖對齊)
2 第三方支持: 支持 OpenCV, PCL, ROS, HALCON 等開源和商業(yè)庫。
2. 系統(tǒng)要求
n USB端口:推薦使用USB 3.0及以上端口以確保深度數(shù)據(jù)穩(wěn)定高速傳輸。
n 處理器:建議使用Intel Core i7或同等性能以上的處理器,用于實(shí)時(shí)計(jì)算深度圖。
n 內(nèi)存:建議 8GB RAM 及以上。
n 操作系統(tǒng):64位Windows 10/11 或 Linux。
n 嵌入式設(shè)備可使用 MIPI 或 USB3.0 接口
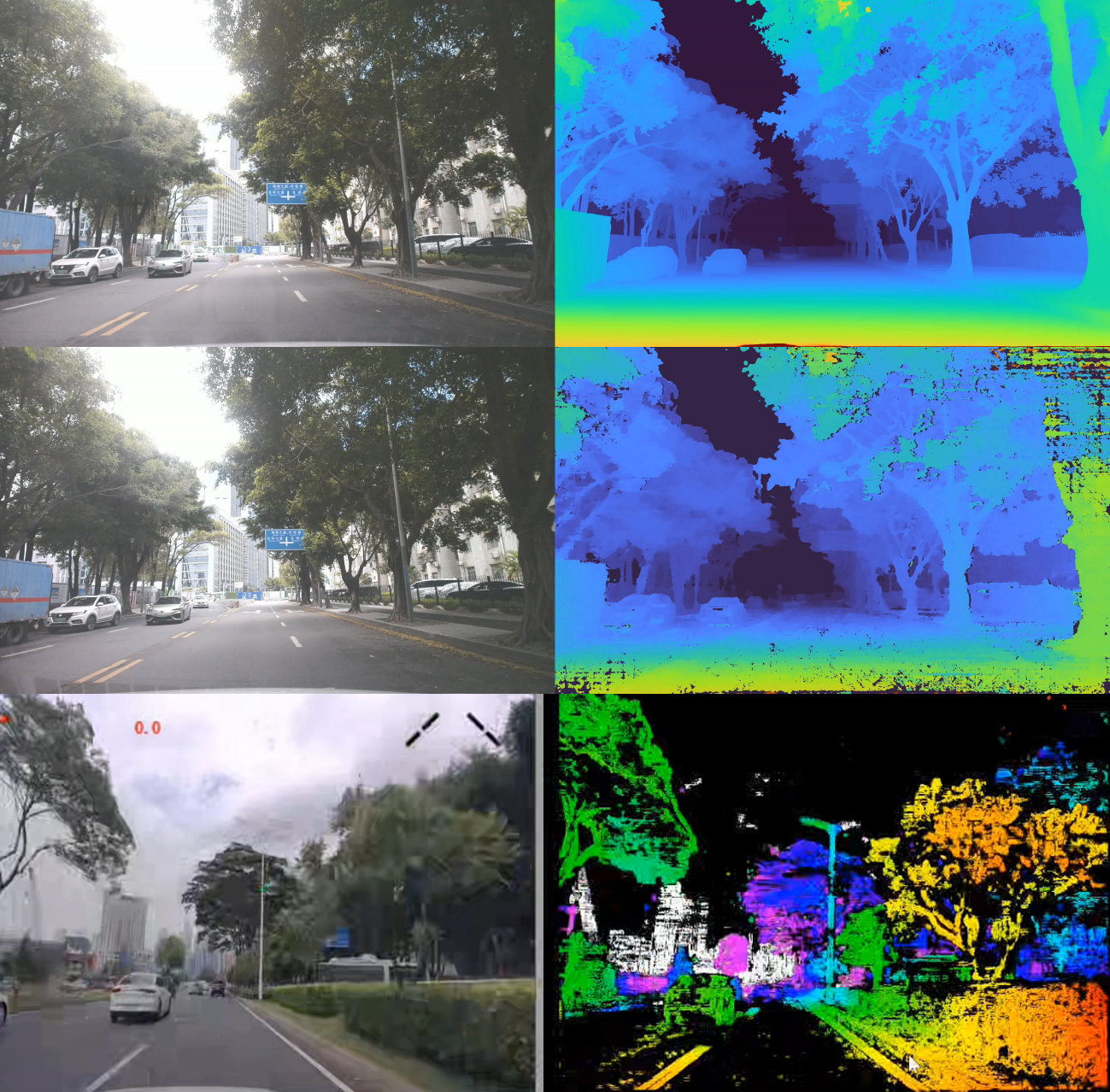
六、實(shí)現(xiàn)效果
七、訂購信息
型號 | 描述 |
STEREO-CAM-60-U3 | USB3.0雙目相機(jī),含數(shù)據(jù)線與SDK |
STEREO-CAM-60-MIPI | USB3.0雙目相機(jī),帶MIPI輸出,含數(shù)據(jù)線 |
八、免責(zé)聲明與備注
1. 上述測距精度為在室內(nèi)光照良好、物體紋理豐富的理想實(shí)驗(yàn)室環(huán)境下測得。實(shí)際精度可能因環(huán)境光照、物體特性(反光、無紋理)、相機(jī)參數(shù)設(shè)置等因素而有所不同。
2. 本規(guī)格書內(nèi)容只供參考,本公司保留在不另行通知的情況下修改產(chǎn)品設(shè)計(jì)和規(guī)格的權(quán)利。
3. 產(chǎn)品外觀與尺寸以實(shí)物為準(zhǔn)。
")
")
RTK-SCAM-60雙目相機(jī)
RTK-SCAM-60雙目相機(jī)規(guī)格書
一、產(chǎn)品概述
本產(chǎn)品是一款高精度、5V 供電的雙目立體視覺相機(jī)。它由兩個(gè)經(jīng)過精密同步和校準(zhǔn)的單獨(dú)相機(jī)組成,固定基線為 60mm,專為三維空間感知與距離測量而設(shè)計(jì)。通過內(nèi)置的立體匹配算法,可直接輸出高精度的深度圖與點(diǎn)云數(shù)據(jù)。
產(chǎn)品即插即用,無需外部電源,普遍適用于機(jī)器人導(dǎo)航、三維重建、體積測量、避障檢測和互動(dòng)娛樂等領(lǐng)域。既可滿足室內(nèi)環(huán)境,又可滿足室外復(fù)雜光照條件及惡劣天氣,滿足使用溫度范圍。同時(shí)能提供相應(yīng)的感知算法。
模組基于歐冶SD3589高性能SOC,具備高強(qiáng)的ISP圖像處理能力,可針對不同環(huán)境,輸出高質(zhì)量的圖像。內(nèi)置DPU單元,可輸出好的的深度圖像。4T算力的NPU單元,可高效運(yùn)行相應(yīng)的感知算法,便于機(jī)器人上的應(yīng)用和集成。
二、主要特性
1. 一體化立體系統(tǒng): 出廠前已完成雙相機(jī)同步觸發(fā)、硬件對齊和高精度立體校準(zhǔn),用戶無需復(fù)雜的標(biāo)定流程。
2. 主動(dòng)同步: 左右相機(jī)使用 Global Shutter Sensor,圖像采集由硬件信號嚴(yán)格同步,有效消除運(yùn)動(dòng)模糊。
3. 精密機(jī)械結(jié)構(gòu): 堅(jiān)固的金屬/工程外殼確保 60mm 基線在各類工況下保持穩(wěn)定,保證測量精度。
4. 即插即用: 符合 UVC 協(xié)議和 MIPI_CSI 傳輸協(xié)議,通過 USB3.0 接口或 MIPI 接口同時(shí)完成供電和數(shù)據(jù)傳輸,集成簡便。
5. 實(shí)時(shí)深度感知: 提供完整的 SDK,支持實(shí)時(shí)輸出深度圖、校正后 RGB 彩色圖。
6. IMU數(shù)據(jù):同步輸出三軸加速度計(jì)和三軸陀螺儀,時(shí)間戳和視頻幀嚴(yán)格對齊。
7. 低功耗設(shè)計(jì): 整體功耗優(yōu)化,可由標(biāo)準(zhǔn)電腦 USB 端口穩(wěn)定供電。
三、規(guī)格參數(shù)
3.1. 系統(tǒng)規(guī)格
? 雙核 ARM 64 位 Cortex A55 處理器
? 高性能 ISP 圖像處理引擎
? 高效人工智能處理引擎 NPU INT8 算力 2~4T
? MIPI 接口,實(shí)時(shí)響應(yīng)
? USB 3.0 接口,適配性強(qiáng)
? 大視場角,更寬視野范圍
3.2. 產(chǎn)品規(guī)格
項(xiàng)目 | 規(guī)格 |
傳感器配置 | 兩個(gè)全局快門CMOS傳感器 |
基線長度 | 60mm (固定) |
測距范圍 | 0.3m ~ 16m |
同步方式 | 硬件同步 |
數(shù)據(jù)接口 | USB 3.0 Type-C (兼容 USB 2.0,建議使用 USB3.0) |
MIPI_TX_CSI + 1.5Mbps 串口 + I2C | |
供電 | DC 5V ±5% (通過 USB 接口取電) |
整機(jī)功耗 | 小于2.5W (典型值 2.0W),哨兵模式小于2W |
二次開發(fā) | 雙核A55@1.0GHz,NPU@4.0Tops, 支持相機(jī)內(nèi)做 AI 感知、SLAM |
3.3. 圖像參數(shù)
規(guī)格 | 參數(shù) | |
深度輸出格式 | 16 位無符號整數(shù) (單位:1/4 毫米) | |
RGB 圖像 | 分辨率/幀率 | 640×480(1280×1080)/25fps |
數(shù)據(jù)格式 | YUV422 | |
FOV | H80±3°, V60±2° | |
Depth 圖像 | 分辨率 | 640×400(1280×720)/25fps |
數(shù)據(jù)格式 | RGB888 | |
FOV | H78°, V45° | |
啟動(dòng)時(shí)間 | ≤2S | |
3.4. 單目相機(jī)規(guī)格 (單顆)
項(xiàng)目 | 規(guī)格 |
傳感器類型 | 1/3.2”全局快門CMOS |
較高分辨率 | 1280×1080 @30fps(HD) |
像素尺寸 | 3.0um×3.0um |
鏡頭接口 | M12 |
水平視場角(FOV) | 80±3° |
3.5. 深度性能
項(xiàng)目 | 規(guī)格 |
深度圖分辨率 | 較高支持1280×720 @30fps |
測距范圍 | 0.3m - 16m |
精度(距離d) | 0.3m - 2m :±m(xù)ax(2cm,d×1%) |
2m - 5m :±d×2% | |
5m - 16m :精度逐漸下降,可用于物體檢測與粗略測距 |
精度示例:
? 在1m處,精度為 ±m(xù)ax(2cm, 1cm) = ±2cm。
? 在2m處,精度為 ±m(xù)ax(2cm, 2cm) = ±2cm。
? 在3m處,精度為 ± 3m × 2% = ±6cm。
? 在4m處,精度為 ± 4m × 2% = ±8cm。
四、機(jī)械與環(huán)境規(guī)格
項(xiàng)目 | 規(guī)格 |
產(chǎn)品尺寸 | 約:150mm×60mm×40mm不含外殼 |
重量 | 約150g |
外殼材質(zhì) | 鋁合金+工程塑料 |
工作溫度 | 0°C~+45°C |
存儲(chǔ)溫度 | -20°C~+60°C |
濕度 | 20%~80% RH(無冷凝) |
五、軟件與開發(fā)支持
1. 開發(fā)環(huán)境
2 操作系統(tǒng): Windows 10/11, Linux (Ubuntu 18.04+), macOS (部分功能)
2 開發(fā)接口: 提供 C/C++, Python, C# API
2 SDK 功能:
ü 相機(jī)參數(shù)控制(曝光、增益、白平衡)
ü 左右原始圖像采集
ü 深度圖計(jì)算與輸出
ü RGB-D 對齊(彩色圖與深度圖對齊)
2 第三方支持: 支持 OpenCV, PCL, ROS, HALCON 等開源和商業(yè)庫。
2. 系統(tǒng)要求
n USB端口:推薦使用USB 3.0及以上端口以確保深度數(shù)據(jù)穩(wěn)定高速傳輸。
n 處理器:建議使用Intel Core i7或同等性能以上的處理器,用于實(shí)時(shí)計(jì)算深度圖。
n 內(nèi)存:建議 8GB RAM 及以上。
n 操作系統(tǒng):64位Windows 10/11 或 Linux。
n 嵌入式設(shè)備可使用 MIPI 或 USB3.0 接口
六、實(shí)現(xiàn)效果
七、訂購信息
型號 | 描述 |
STEREO-CAM-60-U3 | USB3.0雙目相機(jī),含數(shù)據(jù)線與SDK |
STEREO-CAM-60-MIPI | USB3.0雙目相機(jī),帶MIPI輸出,含數(shù)據(jù)線 |
八、免責(zé)聲明與備注
1. 上述測距精度為在室內(nèi)光照良好、物體紋理豐富的理想實(shí)驗(yàn)室環(huán)境下測得。實(shí)際精度可能因環(huán)境光照、物體特性(反光、無紋理)、相機(jī)參數(shù)設(shè)置等因素而有所不同。
2. 本規(guī)格書內(nèi)容只供參考,本公司保留在不另行通知的情況下修改產(chǎn)品設(shè)計(jì)和規(guī)格的權(quán)利。
3. 產(chǎn)品外觀與尺寸以實(shí)物為準(zhǔn)。